ABSTRACT
A system for detecting the surrounding environment of vehicle comprising a RADAR unit and at least one ultra-lowphase-noise frequency synthesizer, is provided.
A RADAR unit configured for detecting the presence and characteristics of one or more objects in various directions. The RADAR unit may include a transmitter for transmitting at least one radio signal, and a receiver for receiving the at least one radio signalreturned from the one or more objects. The ultra-lowphase-noisefrequency synthesizer may utilize a dual loop design comprising one main PLL and one sampling PLL, where the main PLL might include a DDS or Fractional-N PLL plus a variable divider, or the synthesizer may utilize a sampling PLL only, to reduce phase-noise from the returned radio signal. This system enhances the detection of the exact location of the vehicle based on the received RADAR signatures of objects, azimuth and distance.
Radar target detection system for autonomous vehicles
An Inventor: Dr. Tal Lavian
FIELD
Embodiments of the present disclosure are generally related to sensors for autonomous vehicles (for example, Self-Driving Cars)
and in particular to systems that use ultra-low phase-noise frequency synthesizer for RADAR Sensor Applications for autonomous vehicles.
BACKGROUND
Autonomous vehicles are paving way for a new mode of transportation. Autonomous vehicles require minimum or no intervention from vehicle’s driver.
Generally, some autonomous vehicles need only an initial input from the driver, whereas some other designs of the autonomous vehicles are continuously under control of the driver. There are some autonomous vehicles that can be remotely controlled. For example, automatic parking in vehicles is an example of the autonomous vehicle in operation.
Autonomous vehicles face a dynamic environment that is the environment keeps changing every time. The autonomous vehicles need to keep a track of lane markings, road edges, track road curves, varying surfaces that may include flat surfaces, winding roads, hilly roads etc. Alongside, the autonomous vehicles also need to keep a check on objects that are both stationary or mobile like a tree or a human or an animal. Hence, the autonomous vehicles need to capture a huge amount of information that keeps on changing every time.
Therefore, to overcome and meet these challenges, autonomous vehicles are provided with a various set of sensors. These sensors help the vehicle to gather all around information and help in increasing the degree of autonomy of the vehicle. The various types of sensors currently being used in autonomous vehicles are LiDAR sensors, Ultrasonic sensors, Image sensors, Global Positioning System (GPS) sensors, Inertial Measurement Unit (IMU) sensors, dead reckoning sensors, Microbolo sensors, Speed sensors, Steering-angle sensors, Rotational speed sensors, Real-time Kinematics sensors, and RADAR sensors. Two of the most used sensors are LiDAR and RADAR sensors.
LiDAR sensors: LiDAR is a device that maps objects in 3-dimensional by bouncing laser beams off its real-world surroundings. LiDAR in automotive systems typically uses a 905 nm wavelength that can provide up to 200 m range in restricted FOVs (field of views). These sensors scan the environment, around the vehicle, with a non-visible laser beam. LiDAR sensor continually fires off beams of laser light, and then measures how long it takes for the light to return to the sensor. The laser beam generated is of low intensity and non-harmful. The beam visualizes objects and measures ranges to create a 3D image of the vehicle’s surrounding environment. LiDAR sensors are very accurate and can gather information to even up to very close distances around the vehicle. However, LiDAR sensors are generally bulky, complex in design and expensive to use. The costs can be between around $8,000 and even up to $100,000. Smaller and less expensive LiDAR sensors are starting to be in the market. LiDAR may also require complex computing of the data collected that also adds to the costs. Also, in general, LiDARs can capture data up to a distance of around 200 m.
It is to be noted that LiDAR requires optical filters to remove sensitivity to ambient light and to prevent spoofing from other LiDARs. Also, the laser technology used has to be “eye-safe”. Recently there are efforts being made to replace mechanical scanning LiDAR, that physically rotates the laser and receiver assembly to collect data over an area that spans up to 360° with Solid State LiDAR (SSL). SSLs have no moving parts and are therefore more reliable especially in an automotive environment that requires long-term reliability. However, SSLs currently have lower field-of-view (FOV) coverage.
In current LiDAR sensor design coverage is also a problem in terms of sensor gap and overlap, since the LiDAR in autonomous vehicles has very limited redundancy sensors that can provide the level of imaging that a LiDAR provides under optimal conditions. LiDAR is also weather susceptible. It turns blind when it comes to imaging in adverse weather conditions. LiDAR has limitations of creating clear imaging in conditions of fog, rain, snow, direct sunlight, and darkness. Also, LiDAR cannot read letters on a signboard. This is so because the signboard is flat.
RADAR sensors: RADAR sensors basically send out electromagnetic waves. When these waves hit an obstacle, they get reflected. Thus, revealing how far away an object is and how fast is it moving.
RADAR sensors are very crucial in today’s autonomous vehicle applications. They are required to be more accurate.
Automotive RADARs can be categorized into three types: long-range RADARs, medium range RADARs, and short-range RADARs. Long range RADARs are used for measuring the distance to and speed of other vehicles. Medium range RADARs are used for detecting objects within a wider field of view e.g. for cross traffic alert systems. Short range RADARs are used for sensing in the vicinity of the car, e.g. for parking aid or obstacle detection. Depending on the application, RADAR requirements differ. Short range applications require a steerable antenna with a large scanning angle, creating a wide field of view. Long range applications, on the other hand, require more directive antennas that provide a higher resolution within a more limited scanning range. Two different frequency bands are mainly used for automotive RADARs: the 24 GHz band and the 77 GHz band. The 77 GHz band offers higher performance, but it is also more challenging to implement since for example losses are much higher at these frequencies. The 24 GHz RADARs are easier to develop but are larger in size, making it difficult to integrate them in a vehicle. RADARs operating at 24 GHz require around three times larger antennas than RADARs operating at 77 GHz, to achieve the same performance. A 77 GHz RADAR would thus be much smaller resulting in easier integration and lower cost. Moving to higher frequencies enables RADARs with a better resolution. However, a major challenge posed is to develop steerable antennas for 77 GHz RADARs with high enough performance at a reasonable cost. In one embodiment of the invention different types of antenna and meta-material-based antennas that are less prone to phase noise disturbance will benefit from this invention.
Some Automotive RADAR systems use a pulse-Doppler approach, where the transmitter operates for a short period, known as the pulse repetition interval (PRI), then the system switches to receive mode until the next transmit pulse. As the RADAR signal returns, the reflections are processed coherently to extract range and relative motion of detected objects. Another approach is to use Continuous Wave Frequency Modulation (CWFM) or Frequency Modulated Continuous Wave (FMCW). This approach uses a continuous carrier frequency that varies over time with a receiver constantly on. To prevent the transmit signal from leaking into the receiver, separate transmit and receive antennas are used.
Generally, there are three types of RADARs in use in autonomous vehicles. Short range RADAR, that helps in collision warning, and provide assisted parking support. Medium Range RADAR helps to watch corners of the vehicle, help in blind spot detection, lane detection and avoid side/corner collisions. Further, long-range RADARs help in adaptive cruise control functions and early collision detection functions.
RADAR signal processing also needs to be efficient. It needs to intelligently group the bouncing signals from the same object in the range. Otherwise, the RADAR signal processing will be overwhelmed with the amount of signal processing and may get confused. Grouping is made possible by use of Doppler shift of the signals bouncing off from the surfaces with a. velocity different from the observation domain. Thus, Doppler maps are created, that depict the range to object returns on one axis and extracted velocity of the targets on the other.
RADARs have also been used for identifying and classifying humans. RADARs are not efficient in performing the human identification; however, there have been techniques that are being used for human identification.
One of the techniques uses reflectivity of humans using an ultra-wideband RADAR. In this technique, the polarization of the reflected signal can be analyzed and can be determined that there are some frequencies where, in one polarization, there is maximum reflectivity and a minimum in the other. However, the polarized signal depends mainly on the shape, posture, and position of the person. Thus, making it a highly unreliable technique for classification.
Another technique used for human classification uses a dual-band frequency modulated continuous wave RADAR. In this technique, the difference in reflected signal from an object at different frequencies (commonly 10 Hz to 66 Hz) is compared. Through this comparison, the threshold for the ratio of the received intensity between two frequencies, above which detected objects can be classified as animated was established.
Some techniques utilized and analyzed Doppler spectrum of CW RADAR to obtain a Doppler or micro-Doppler Signature for a walking human. Whereas, some of the techniques used wavelet transform to extract the micro signatures created by human walking. The same techniques can be utilized for other human movement and gesture control.
Other techniques that should be mentioned here include the use of 2 or more different frequencies and multiple chirp types, These and the techniques above support the evaluation and recognition of the electromagnetic characteristics and properties of a human being or another targeted object. These techniques can be used for material detection and human classification. Also, the usage of multiple frequencies and chirp types provides information for micro-Doppler and radar signature evaluation and recognition.
The techniques mentioned are directed towards identification of a human and distinguish them from other walking objects like animals. However, these techniques can also be used to recognize animals.
RADAR sensors are low priced and provide as excellent sensors. RADARs also cost much less than LiDAR and may be procured within $150. These sensors work extremely accurately in bad weather conditions like fog, snow, dirt, etc. RADAR sensors use extremely simple circuitry and thus are smaller in size that makes them easy to be manufactured, installed and used. However, one of the major drawbacks of the RADAR sensors is that they give confusing results when multiple objects are within the range. They are not able to filter noise in such situations. Existing RADARs do not offer the necessary resolution to distinguish objects with sufficient reliability. One of the main problems faced is the separation of small and large objects that travel at the same distance and velocity in adjacent lanes, e.g. a motorcycle driving in the lane next to a truck.
Major factors affecting RADAR performance are described in the following paragraphs:
Transmitter Power and Antenna:
The maximum range of a RADAR system depends in large part on the average power of its transmitter and the physical size of its antenna. This is also called the power-aperture product. The antenna itself remains a challenge for autonomous vehicles and a lot is invested in various antenna developments. The invention described here can be used with a type of antenna including antennas based and made out of meta-materials. In fact, the synergy between a meta-material antenna and this invention would result in a very high performing radar sensor.
Receiver Noise:
The sensitivity of a RADAR receiver is determined by the unavoidable noise that appears at its input. At microwave RADAR frequencies, the noise that limits detectability is usually generated by the receiver itself (i.e., by the random motion of electrons at the input of the receiver) rather than by external noise that enters the receiver via the antenna.
Target Size:
The size of a target as “seen” by RADAR is not always related to the physical size of the object. The measure of the target size as observed by RADAR is called RADAR cross-section and is determined in units of area (square meters). It is possible for two targets with the same physical cross-sectional area to differ considerably in RADAR size or RADAR cross-section. For example, a flat plate 1 square meter in the area will produce a RADAR cross-section of about 1,000 square meters at a frequency of 3 GHz when viewed perpendicular to the surface. A cone-sphere (an object resembling an ice-cream cone) when viewed in the direction of the cone rather than the sphere could have a RADAR cross-section of about 0.001 square meters even though its projected area is also 1 square meter. Hence, this may cause calculation mistakes and may give the wrong estimation of the objects identified.
Clutter:
Echoes from environmental factors like land, rain, birds and other similar objects may cause a nuisance to detect objects. Clutter makes it difficult to identify objects and their properties to a considerable extent.
Interference:
Signals from nearby RADARs and other transmitters can be strong enough to enter a RADAR receiver and produce spurious responses. Interference is not as easily ignored by automatic detection and tracking systems. Hence, interference may further add to noise to the RADAR signals.
Phase-Noise:
Phase-noise is defined as the noise created by short term phase fluctuations that occur in a signal. The fluctuations display themselves in the frequency domain as sidebands which appear as a noise spectrum spreading out either side of the signal (Can be seen on FIG. 34)
Comparison Between LiDAR and RADAR
As compared to LiDAR sensors, RADAR sensors provide more robust information to the vehicles. LiDAR sensors are generally mounted on top of the vehicle and are mechanically rotated to gather surrounding information. This rotational movement is prone to dysfunction. Whereas in case of RADAR, as they are solid state and have no moving parts hence have a minimal rate of failures.
Also, LiDAR sensors produce pulsed laser beams and hence are able to gather information only when the pulsed beam is generating the laser beams. RADAR sensors can generate continuous beams and hence provide continuous information.
Also, LiDAR sensors generate enormous and complex data for which complex computational modules are required to be used. For example, some types of LiDAR systems generate amounts of 1-Gb/s data that require a substantial amount of computation by strong computers to process such high amount of data in a timely manner. In some cases, these massive computations require additional computation and correlation of information from other sensors and sources of information. These increases cost overheads for vehicle manufacturers. Whereas, RADAR sensors only generate small fractions of data that are easy to compute.
LiDAR sensors are also sensitive to adverse weather conditions such as rain, fog, and snow while RADAR sensors are not prone to weather conditions. Though RADAR is not affected by darkness and it can work well in adverse weather conditions, it may lower its resolution.
RADAR signatures of a walking human being are a big problem. These signatures are not easily recognizable. Detection of human beings is a problem to which most of the computing algorithms do not have good solutions. There are various algorithms known as segmenting algorithms that do provide a certain level of the solution. The processing engine of an autonomous vehicle may take input from RADAR, LiDAR, Camera, Ultrasound and other multiple sensors to build an image of the surroundings of the vehicle.
Further, RADARs are generally used to detect receding and approaching objects. Use of RADARs helps to decelerate the vehicle in applicable situations and warn the driver.
Stationary RADAR sensors are also in use to monitor a predetermined space for e.g. railway crossings may be monitored using stationary RADARs. The usage includes identification of objects in such railway crossings. In such situations either a warning can be generated, or the train may be decelerated. However, to effectively use the stationary RADARs it is very important to be able to determine the size of the objects identified by the RADAR sensor. These RADARs may include height estimating systems for objects located in the range of such a RADAR. This needs to be accurate as even small amounts of deviations between the plane and vertical sensor axis can result in large errors in estimating the object’s size.
However, RADAR sensors are challenged when dealing with slow-moving objects such as cars, bicycles, and pedestrians. Furthermore, these traditional RADAR systems, whether using a modulated or non-modulated signal, have difficulties identifying objects that are very close to each other since one of them will be obscured due to the phase-noise of the system. Also, the drawback of existing RADAR sensors is the impact on their accuracy due to the phase-noise of its frequency source, the synthesizer. RADAR sensors are not able to relay size and shape of objects as accurately as LiDAR. RADAR sensors might not be a stand-alone solution. They can be accompanied by ultrasonic sensors or cameras. Though, RADAR is excellent in finding things that are solid over long distances, but, it may be challenging to identify things that are in a short range.
Therefore, there is a need for an enhanced detection system capable of implementing artificial intelligence using various sensory fusion including a plurality of LiDAR, Camera, Ultrasound, and RADAR sensors for helping in making informed decisions based on surrounding information for semi or autonomous vehicles. Furthermore, the system should be capable to overcome the shortcomings of the existing systems and technologies.
SUMMARY
Some of the Benefits of the Invention:
The present invention emphasizes that by incorporating the ultra-low phase-noise synthesizer in an existing RADAR system,
the performance of the RADAR system will be improved substantially in terms of target detection accuracy and resolution and because of this it can become the dominant sensor for the handling of autonomous cars. Herein, the Synthesizer drastically reduces the phase-noise of RADAR signals so that such RADAR sensor will be able to replace current sensor systems at very low cost and with reliability at all lighting and adverse weather conditions.
A system that utilizes an ultra-lowphase-noise synthesizer will be able to provide data to a processor that can determine the electromagnetic characteristics of an object with sufficient accuracy so that the system is able to determine if the object is a living object such as a human being or an animal or if it is inanimate. It will also be able to provide data that is accurate enough to differentiate between the material objects are made of such as differentiating between wood and stone for example. As an example, the data generated by the RADAR system could be used to identify and verify the presence of a human on the sidewalk about to cross the street or a bicycle rider at the side of the road.
Further as a derivative of the capability to determine the material an object is made of combined with the electromagnetic waves capability to penetrate through many materials an object detection system utilizing an ultra-lowphase-noise synthesizer will provide data that will enable a processing unit (such as a specialized processor of the object detection system) to find objects that are visually obscured by another object and determine the material of the obscured and obscuring object. Thus, the system may be able to find a human behind a billboard/bus station advertisement or wildlife behind a bush or determine that these are only 2 bushes (or non-animated objects) one behind the other.
Further, a Radar system that utilizes an ultra-low phase-noise synthesizer will also include the possibility to be implemented inside a vehicles cabin. In such an implementation the Radar system would be able to count passengers inside the vehicle and monitor their vital signs and even detect the eyelid movement of the driver to detect fatigue for instance. In addition, such a radar system could be used in an autonomous vehicle used for ride sharing to determine if anything has been forgotten inside the vehicle or if any type of dirt or litter has been left behind or if the vehicle has been soiled.
In addition, a Radar system that utilizes an ultra-low phase-noise synthesizer will benefit from improved capabilities such as identification of small movements of an object through improved micro-doppler performance for example. That way such a radar system could identify small movements of limbs and gestures and other small details of the environment. This feature could, for example, be used in an embodiment to improve the prediction of human behavior.
Additionally, a RADAR system that utilizes an ultra-lowphase-noise synthesizer may be used as an imaging RADAR that can discover silhouettes and create a true 3-dimensional map of the surroundings of the vehicle including the mapping of the objects that are not visible with light. Such a RADAR System would also be able to utilize Synthetic Aperture Radar (SAR) technology, Interferometry and Polarimetry (or other SAR related technologies) to define the exact characteristics of an objects backscatter such as, but not limited to, Surface roughness, Geometric structure, Orientation and more. Further, an ultra-lowphase-noise RADAR system enables the determination of electrical characteristic such as, but not limited to, Dielectric constant, Moisture content, Conductivity and more. The data creation of electromagnetic characteristics can also be achieved by combining the ultra-lowphase-noise synthesizer of this invention and using 2 or more different frequencies and multiple chirp types.
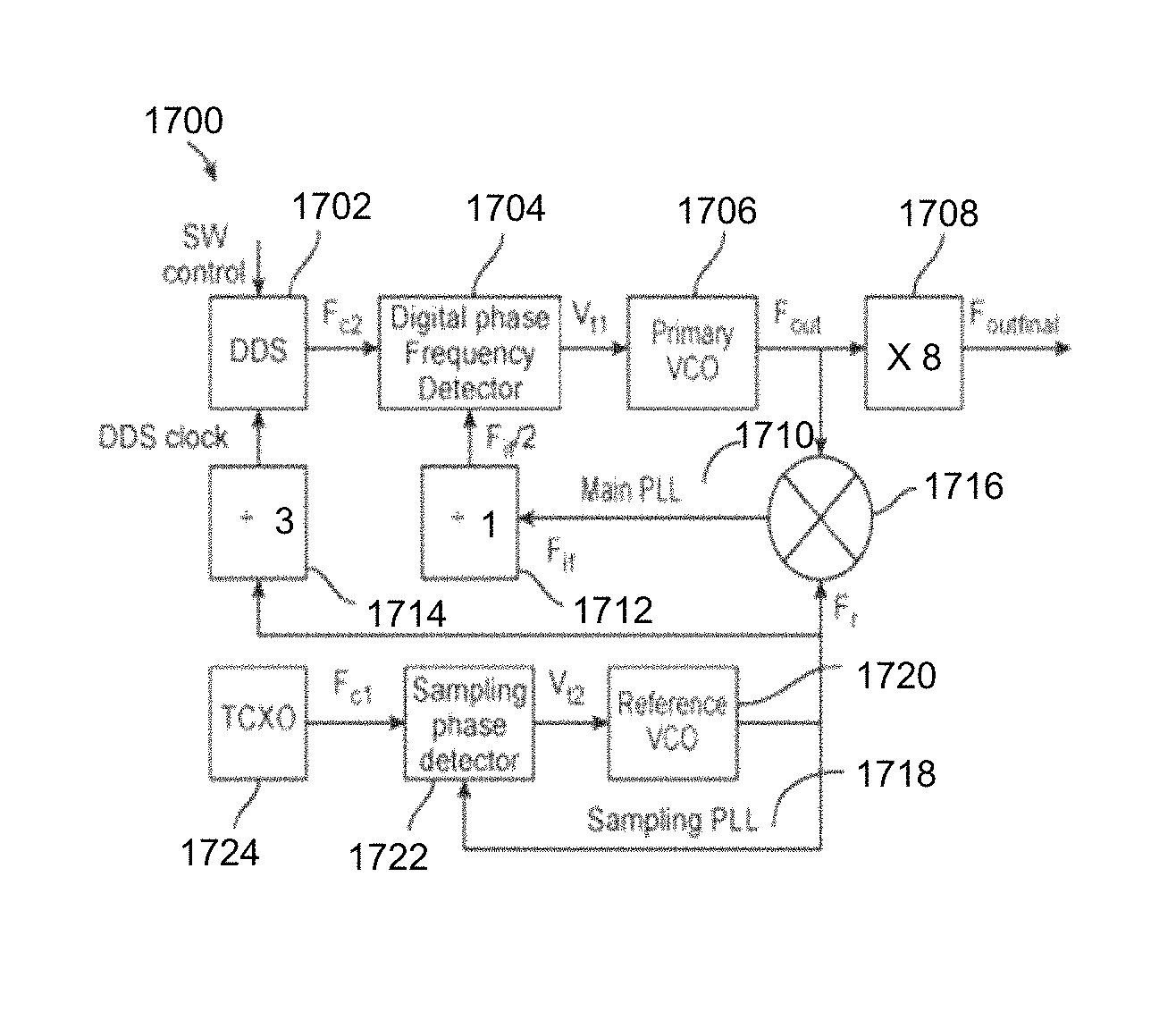
According to an embodiment of the present disclosure an object detection system for autonomous vehicles is provided, The object detection system may include a RADAR unit coupled to at least one ultra-lowphase-noise frequency synthesizer, configured for detecting the presence of one or more objects in one or more directions, the RADAR unit comprising: a transmitter for transmitting at least one radio signal; and a receiver for receiving at least one radio signalreturned from one or more objects/targets. Further, the object detection system may include the at least one ultra-low phase-noise frequency synthesizer that may be utilized in conjunction with the RADAR unit, for refining both the transmitted and the received signals, and thus determining the phase-noise and maintaining the quality of the transmitted and the received radio signals, wherein the at least one ultra-low phase-noise frequency synthesizer comprises: (i) at least one clocking device configured to generate at least one first clock signal of at least one first clock frequency; (ii) at least one sampling Phase Locked Loop (PLL), wherein the at least one sampling PLL comprises: (a) at least one sampling phase detector configured to receive the at least one first clock signal and a single reference frequency to generate at least one first analog control voltage; and (b) at least one reference Voltage Controlled Oscillator (VCO) configured to receive the at least one analog control voltage to generate the single reference frequency; and (c) a Digital Phase/Frequency detector configured to receive the at least one first clock signal and a single reference frequency to generate at least a second analog control voltage; and (d) a two-way DC switch in communication with the Digital Phase/Frequency detector and the sampling phase detector; (iii) at least one first fixed frequency divider configured to receive the at least one reference frequency and to divide the at least one reference frequency by a first predefined factor to generate at least one clock signal for at least one high frequency low phase-noise Direct Digital Synthesizer (DDS) clock signal; (iv) at least one high-frequency low phase-noise DDS configured to receive the at least one DDS clock signal and to generate at least one second clock signal of at least one second clock frequency; and (v) at least one main Phase Locked Loop (PLL).
Hereinabove, the main PLL may include: (a) at least one high-frequency Digital Phase/Frequency detector configured to receive and compare the at least one second clock frequency and at least one feedback frequency to generate at least one second analog control voltage and at least one digital control voltage; (b) at least one main VCO configured to receive the at least one first analog control voltage or the at least one second analog control voltage and generate at least one output signal of at least one output frequency, wherein the at least one digital control voltage controls which of the at least one first analog control voltage or the at least one second analog control voltage is received by the at least one main VCO; (c) at least one down convert mixer configured to mix the at least one output frequency and the reference frequency to generate at least one intermediate frequency; and (d) at least one second fixed frequency divider configured to receive and divide the at least one intermediate frequency by a second predefined factor to generate the at least one feedback frequency.
Herein, the RADAR unit or units create a 3-dimensional RADAR image using one or more RADAR sensors and/or one or more frequencies. The transmitting RADAR may be at one location of the vehicle while the receiving unit is at another location. The RADAR sensors may utilize Synthetic aperture RADAR (SAR) technology to create the 3-dimensional image. The 3-dimensional image may include information about objects that are obscured by visible light. In an embodiment, Bi-static and multi-static may also involve one vehicle transmitting while one or more other vehicles receive the return signals.
Further, the data from the Radar unit comprising an ultra-lowphase-noise synthesizer can and should be used for improved compressed sensing, micro-Doppler classification, object classification by electromagnetic characteristics and radar-based mapping of cities, roads and other venues that can or are being mapped with visual sensors
Also, in an embodiment of the invention presented here, the system can use a type of antenna including antennas made out of meta-materials or other materials.
Herein, the radar unit determines a distance and a direction of each of one or more objects. Further, the radar unit determines one or more characteristics, of two close objects irrespective of the size of the one or more objects. Again further, the radar unit differentiates between two or more types of the objects when one object is visually obscuring another object. Additionally, the radar unit utilizes a modulated or non-modulated radio signal, to determine the presence of a slow-moving target despite the very small Doppler frequency shift. Also, the radar unit utilizes a modulated or non-modulated radio signal, to determine the presence of a close-range target despite the very short signal travel time.
Additionally, a vehicle with RADAR imaging capabilities may create contact with other vehicles that have that same feature. The group of 2 vehicles or more will have an identification scheme, or will set up one, so that every vehicle will be able to detect return signals from every other vehicle and thus combine a 3-dimensional map of the surroundings for immediate autonomous driving purposes and/or mapping or another purpose. This modus operandi should not be limited only to vehicles transmitting and receiving a Radar signal, the transmitter or receiver can also be stationary, such as a radar on a traffic light that warns vehicles about congestion at a crossing. Actions derived from that information might include slowing down or having the GPS recalculate the route to avoid congestion.
The object detection system may further include at least one additional sensor system, available on the autonomous vehicle, or a database connection in conjunction with the RADAR unit. The combined object detection and/or classification and imaging system may be used as real-time sensors and/or as (real-time) mapping device for single or multiple vehicles use through a direct vehicle-to-vehicle (V2V) or other connectivity solution
Further, considering the example of the pedestrian on the sidewalk or the bicycle rider at the side of the road once the RADAR unit has detected something of interest this can be used in conjunction with other sensors, a LiDAR device for instance. In such a case the visible field for the LiDAR could be reduced to 1/100 of its usual Field of View (FOV) and the elevation angle by another 1/10 to 1/100 of its original FOV reducing the computation needed for the LiDAR by 1/1000 to 1/10000.
Further, the at least one ultra-low phase-noise frequency synthesizer further comprises at least one fixed frequency multiplier configured to receive and multiply the at least one output signal generated by the at least one main PLL by a predefined factor to generate at least one final output signal of at least one final output frequency. The at least one ultra-low phase-noise frequency synthesizer is implemented on the same electronic circuitry or on a separate electronic circuitry. Further, the ultra-low phase-noise frequency synthesizer may be used to generate the up or down converting the signal of the RADAR unit.
Further, according to another embodiment of the present disclosure, a method for autonomous vehicles is disclosed. The method may include (but is not limited to): detecting a presence of one or more objects in one or more directions by a RADAR unit. Herein, the RADAR unit comprising: a transmitter for transmitting at least one radio signal to the one or more objects; and a receiver for receiving the at least one radio signal returned from the one or more objects. Further, the method may include performing, by at least one ultra-low phase-noise frequency synthesizer for refining the transmitted signal and not adding phase-noise to the received signals, and thereby determining a phase-noise and maintaining the quality of the transmitted and the received radio signals.
Herein, the method may further include various steps such as receiving and multiplying, by the ultra-low phase-noise frequency synthesizer, the at least one output signal by a predefined factor to generate at least one final output signal of at least one final output frequency. Further, the method may generate the up converting or down converting the signal of the RADAR unit. Furthermore, the method may determine the presence of a slow-moving target despite the very small Doppler frequency shift. Again further, the method may include determining the presence of a close-range target despite the very short signal travel time. Additionally, the method may determine a distance and a direction of each of the one or more objects. Furthermore, the method may determine a type of material an object is made up of. Also, the method may include a step of activating one or more additional sensors for operation thereof in conjunction with the RADAR unit. The method may determine characteristics of two close objects irrespective of the size of the objects. Further, the method may differentiate between two or more types of the objects when one object is visually obscuring another object. Further, the method may improve techniques such as compressed sensing, micro-Doppler classification and object classification according to its electromagnetic characteristics.
According to an embodiment of the present disclosure, a system is a detection system that comprises a RADAR unit, communicably coupled to at least one ultra-low phase-noise frequency synthesizer, is provided. The RADAR unit configured for detecting the presence of one or more objects in one or more directions. Herein, the RADAR unit comprising: a transmitter for transmitting at least one radio signal; and a receiver for receiving at least one radio signal returned from one or more objects/targets. Further, the detection system may include at least one ultra-low phase-noise frequency synthesizer that may be configured for refining the returning the at least one radio signal to reduce phase-noise therefrom.
Herein, the system includes at least one ultra-low phase-noise frequency synthesizer configured to determine phase-noise and quality of the transmitted and the received at least one radio signal. The ultra-lowphase-noise frequency synthesizer is a critical part of a System, regardless of how it is implemented. The ultra-lowphase-noise frequency synthesizer comprises one main PLL (Phase Lock Loop) and one reference sampling PLL. The main PLL comprises one high-frequency DDS (Direct Digital Synthesizer), one Digital Phase Frequency Detector, one main VCO (Voltage Controlled Oscillator), one internal frequency divider, one output frequency divider or multiplier and one down convert mixer. The reference sampling PLL comprises one reference clock, one sampling phase detector, one digital phase/frequency detector and one reference VCO. This embodiment provides a vast and critical improvement in the overall system output phase-noise. The synthesizer design is based on the following technical approaches—a) using of dual loop approach to reducing frequency multiplication number, b) using of sampling PLL as the reference PLL to make its noise contribution negligible, c) using of DDS to provide high-frequency input to the main PLL and d) using of high-frequency Digital Phase Frequency Detector in the main PLL.
In an additional embodiment of present disclosure, the system includes at least one ultra-low phase-noise frequency synthesizer configured to determine phase-noise and quality of the transmitted and the received at least one radio signal. The ultra-low phase-noise frequency synthesizer comprises one main PLL (Phase Lock Loop) and one reference sampling PLL. The main PLL further comprises one Fractional-N Synthesizer chip, one primary VCO (Voltage Controlled Oscillator) and one down convert mixer. The Fractional-N Synthesizer chip includes one Digital Phase Detector and one software controllable variable frequency divider. The reference sampling PLL comprises one reference clock, one sampling phase detector, one digital phase/frequency detector and one reference VCO. This embodiment provides multiple improvements in system output which are based on the following technical approaches—a) using of dual loop approach to reducing frequency multiplication number, b) using of sampling PLL to make its noise contribution negligible, and c) using of a high-frequency Fractional-N Synthesizer chip in the main PLL.
In an additional embodiment of present disclosure, the system includes at least one ultra-low phase-noise frequency synthesizer configured to determine phase-noise and quality of the transmitted and the received at least one radio signal. The ultra-lowphase-noise frequency synthesizer comprises one sampling PLL. The sampling PLL comprises one reference clock, one sampling phase detector, one digital phase/frequency detector and one VCO.
According to an embodiment of the present disclosure, a detection system comprising a RADAR unit and an ultra-lowphase-noise frequency synthesizer is provided. The system is made up of System on Chip (SoC) module. The RADAR unit configured for detecting the presence or imaging of one or more objects in one or more directions. The RADAR unit comprising: a transmitter for transmitting at least one radio signal; and a receiver for receiving the at least one radio signalreturned from the one or more objects/targets. In an embodiment, the Transmit and receive signal frequencies might be equal. For example, if there is no Doppler effect, the signal frequencies may be equal. In an embodiment, the transmit and receive frequencies might also be different, for example in cases where the Doppler effect is present. The ultra-lowphase-noise frequency synthesizer comprises one main PLL (Phase Lock Loop) and one reference sampling PLL. The main PLL further comprises one Fractional-N Synthesizer chip, one primary VCO (Voltage Controlled Oscillator) and one down convert mixer. The Fractional-N Synthesizer chip includes one Digital Phase Detector and one software controllable variable frequency divider. The reference sampling PLL comprises one sampling PLL, and one reference VCO. This embodiment provides multiple improvements in system output which are based on the following technical approaches—a) using of dual loop approach to reducing frequency multiplication number, b) using of sampling PLL to make its noise contribution negligible, and c) using of a high-frequency Fractional-N Synthesizer chip in the main PLL.
In an additional embodiment of the present disclosure, a vehicle having a detection system is disclosed. The detection system may be implemented for detecting information corresponding to one or more objects, the detection unit comprising: a RADAR unit for transmitting radio signals and further for receiving the returned radio signal(s) from one or more objects/targets; and at least one ultra-low phase-noise frequency synthesizer for refining the returned signals to reduce the effect of phase-noise in the returned radio signals. Further, the detection unit comprises a processor for processing the refined signals to determine one or more characteristics corresponding to the one or more objects, the processor determining one or more actions based on one or more factors and the one or more characteristics corresponding to the one or more objects. The processor further may determine one or more actions being adaptable by the vehicle based on one or more characteristics that may originate from the RADAR system and/or in conjunction with information originated from another sensor. The vehicle further includes one or more components communicably coupled to the processor for performing the determined one or more actions.
The detection system may further include a memory for storing information and characteristics corresponding to the one or more objects, and actions performed by the vehicle.
Hereinabove, the at least one ultra-low phase-noise frequency synthesizer may be implemented in a manner as described further in the detailed description of this disclosure. Further, the RADAR unit comprises at least one of: traditional single antenna RADAR, dual or multi-antenna RADAR, synthetic aperture RADAR, and one or more other RADARs. Further, in an embodiment, the processor may determine phase shift in frequencies of the transmitted radio signals and the returned radio signals. Such phase shift (difference in phase-noise frequency) may further be analyzed in light of a frequency of the refined radio signal to self-evaluate overall performance of the detection system (or specific performance of the ultra-low phase-noise frequency synthesizer).
The preceding is a simplified summary to provide an understanding of some aspects of embodiments of the present disclosure. This summary is neither an extensive nor exhaustive overview of the present disclosure and its various embodiments. The summary presents selected concepts of the embodiments of the present disclosure in a simplified form as an introduction to the more detailed description presented below. As will be appreciated, other embodiments of the present disclosure are possible utilizing, alone or in combination, one or more of the features set forth above or described in detail below.
Current Radar sensors that reside in existing vehicles provide coarse information about the vehicles surroundings. This invention discloses a system that utilizes a new and innovative frequency generation mechanism (Synthesizer) to improve the Radar sensor performance significantly. The spectral purity (Phase Noise) of a local oscillator (LO) of a radar system is usually perceived as a parameter that cannot be manipulated or improved. In addition, many radar systems in use today implement a single LO that serves the transmit and receive paths so that the phase-noise close to the carrier frequency is assumed to be cancelled by self-correlation. This assumption originates because near field echoes, that have a very short travel time, will find the LO approximately in the same state as it was during transmission. As a result, the phase-noise is considered partially cancelled out for low frequency deltas around the LO.
Doppler Shift:
Single LO Radar systems are common in Assisted driving systems and autonomous vehicles which turns the emphasis on the statement above to the phrase “the phase-noise is partially cancelled”. The fact that the phase-noise partially cancelled while the signal processing of the Radar systems practically assumes that the phase-noise is completely canceled creates a few disadvantages since these Radars rely heavily on the doppler principle, i.e.: based on frequency shifts. When utilizing the Doppler principal every stationary object theoretically creates a reflected signal that lands exactly on DC after down-conversion. In the presence of phase-noise, stationary objects have some velocity around DC due to that phase-noise. In this specification we will call that “Doppler Jitter” which is generally caused by clutter. In order to reduce the effect of clutter the DC portion of the signal is disregarded for signal processing purposes.
This in turn causes one of 2 issues:
-
- 1. 1st Option—Some clutter still remains because of the doppler jitter, and then slow-moving objects such as walking human beings are obscured by the clutter
- 2. 2nd Option—The Signal processing removes some bandwidth around DC, and then slow-moving objects are completely disregarded.
Both of the options above bare disadvantages which are further exacerbated as follows:
-
- 1. The Radar Cross Section (RCS) of a human is significantly smaller of a car. In some cases, a human’s radar cross section is about 10 to 100 times smaller that of a car or approximately in the order 0 dBsm. On the contrary the RCS of a small car can be between 10 to 20 dBsm, depending on the side the Radar hits the car.
- 2. The slower the vehicle that carries the radar sensor moves the smaller the doppler shift for slow moving objects—a scenario that is common in urban areas where cars and humans coexist.
- 3. In addition to 2 above, the urban environment is also challenging because the distance between vehicle and other surrounding objects may be very short so that the return signal will suffer from one of the 2 issues mentioned above.
- 4. Micro Doppler—the movement of limbs creates very small frequency shifts with very small return signal amplitudes and often times in the opposite or different direction of the generic movement of the human, this again brings us back to the 2 unwanted options in the section above.
To summarize the disadvantages mentioned above with respect to the Doppler frequency shift and phase noise: it is very hard to detect objects that move slow and have a small Radar Cross Section (RCS), such as pedestrians or bicyclists.
On the contrary, with ultra-low phase-noise, it is much simpler to identify and classify objects that move slow and have a small Radar Cross Section (RCS), such as pedestrians or bicyclists. Further it is easier to compute the processing their velocity and location even if the distance is small. Further, Ultra-Low Phase-Noise opens an entire domain of micro-Doppler signal processing.
Phase Noise Amplification:
Radar System uses amplifiers in the transmit, receive and LO distribution paths. All of these amplifiers suffer from a non-linear deficiency usually referred to as “1/f Noise”. Meaning that the amplifier adds more noise closer to the signal it amplifies that further away from it. Vehicle mounted Radar systems usually use a form of Frequency Modulated Continuous Wave (FMCW) which originate from the LO and already carry noise with them in the form of Phase Noise. When these signals travel through an amplifier, the phase-noise is essentially amplified according to 1/f distance from the CW frequency. When implementing the disclosed radar with ultra-low phase-noise synthesizer this kind of spectral contamination is reduced by 100-1000 times.
Pulse Compression
The following section discusses pulse compression, which is a signal processing method very often utilized together with FMCW. During the pulse compression signal creation, the phase-noise of the signal shows as sidelobes or elevated noise around the processed radar echo which essentially triggers 2 ripple effects:
-
- 1. Reduced Signal to Noise Ratio diminishes the capability of object classification (especially objects with a small RCS)
- 2. Reduced Signal to Noise Ratio causes worse Radar sensitivity and results in less range
Additional Advantages of Ultra-Low Phase-Noise
Many Radar systems implement beam forming mechanisms. Whether these mechanisms rely on phase shifting or electronic beamforming, the phase-noise in the system will always add an error in the actual direction of the beam, therefore it is intuitively understandable that with lower phase-noise better angular accuracy of the beam can be achieved.
Although not very advanced in the automotive world, another item that should be mentioned is Synthetic Aperture Radar (SAR) imaging. SAR imaging is in use by aircrafts and satellites for many years and the importance of phase-noise is well understood for the different methods of SAR imaging.
Furthermore, different objects may be consistent or are made out of different materials that have different electromagnetic characteristics, and therefore they will have a return signal that are not only specific to the object’s velocity, size and location, but also specific to its electromagnetic characteristics.
Sensory Fusion:
Ultra-low phase-noise based radar may experience and “see” the environment in different way than camera, LiDAR, ultrasonic sensor or other sensors. In this way the Ultra-low phase-noise based radar “see” non-visual information that is not visible to other sensors. The detection range of such radar can be much larger than other sensors and specifically with adverse weather and lighting. Different objects return different radar signatures that can be used for classification and detection of such object using Artificial Intelligence (AI) and Machine Learning (ML).
In an embodiment of this invention the ultra-low phase noise Radar may start the detection, classification and perception process at a greater range than traditional Radars, thus it may provide an early warning for other sensors and ample time for a processing unit that may process the data, poll data from sensors, run AI/ML algorithms and perform decision making processes.
Ample time of advanced notice about the potential and probability of an object can be fused with other sensors for early processing and focusing to the area and direction of the suspected object. Such object classification may include the statistical probability and likelihood for classification of the detected object in a range. For example, classification probability of P1% detection in range R1, P2% in range R2, and P3% in range R3. In case of detection and classification at a substantially larger range by the radar, the data can be fused and computed as an input or trigger for different sensors.
Some Benefits:
The implementation of ultra-low phase-noise synthesizers in Radar systems has been discussed in detail for the Doppler phenomenon, 1/f noise and pulse compression. Further, beamforming, SAR imaging and material recognition have been mentioned at a high level. Following primary and secondary conclusions can be derived:
-
- 1. Primary advantages for the implementation of ultra-low phase-noise synthesizers in Radar systems are:
- a. Much better accuracy in the Doppler and micro-Doppler domains
- b. Signal processing improvements that have an impact on the accuracy and the range of the Radar sensor
- c. Improved SAR imaging and more accurate usage of beamforming mechanisms
- 2. Secondary advantages for the implementation of ultra-low phase-noise synthesizers in Radar systems are:
- a. The sensory fusion mechanisms will have more accurate Radar sensor data at their disposal and new information vectors that were previously non-existing.
- b. Since Radar is not a “visual sensor” per se, true sensory fusion is made possible.
- c. A single radar sensor can create multiple information vectors about a single object. This satisfies the most important objective of identifying living objects such as a human or an animal.
- 1. Primary advantages for the implementation of ultra-low phase-noise synthesizers in Radar systems are:
In one embodiment of the present invention, a system for detecting the surrounding environment of a vehicle is disclosed. The system may include, but is not limited to, at least first sensor and a processing unit. The at least first sensor may be configured to obtain data. The at least first sensor may include (but is not limited to) a transmitter for transmitting at least one radio signal to the one or more objects within the surrounding environment. Further, the at least one sensor may include a receiver for receiving the at least one radio signal returned from the one or more objects. Furthermore, the at least one sensor may include at least one ultra-low phase noise frequency synthesizer configured to determine phase noise and quality of the transmitted and the received at least one radio signal, wherein the at least one ultra-low phase noise frequency synthesizer comprises at least one sampling Phase Locked Loop (PLL) and at least one main PLL, said Sampling PLL comprises a sampling phase detector and said main PLL comprises a high frequency digital phase/frequency detector. Further, the processing unit coupled to the at least first sensor configured to: gather, electro-magnetic information about the one or more objects; classify or recognize each of the one or more objects by analyzing the data, wherein the classification or recognition is based on a unique signature obtained from each of the one or more objects; generate an electromagnetic map of the surrounding environment by utilizing unique signatures of the one or more objects; and combine the electromagnetic map with a geographical map or physical map.
Hereinabove, the at least first sensor is a RADAR sensor. Further, the data includes information about the electromagnetic properties and characteristics about the object of interest or the surroundings of the vehicle. The data may include (but is not limited to) shape, silhouette, doppler or micro doppler information. Further, the data includes depth, dimensions, direction, height, distance and placement of the object of interest with respect to the vehicle. Furthermore, the classification type of the one or more objects includes living or non-living thing, stationary or moving object, animal or human, standing or mobile human, metal, wood, or concrete.
In another embodiment of the invention, a method for detecting the surrounding environment of a vehicle is disclosed. The method may include (but not limited to) utilizing at least a first sensor to obtain a data. The at least first sensor being utilized for: transmitting, by a transmitter, at least one radio signal to the one or more objects within the surrounding environment; receiving, by a receiver, the at least one radio signal returned from the one or more objects; and determining phase noise and quality of the transmitted and the received at least one radio signal by at least one ultra-low phase noise frequency synthesizer, wherein the at least one ultra-low phase noise frequency synthesizer comprises at least one sampling Phase Locked Loop (PLL) and at least one main PLL, said Sampling PLL comprises a sampling phase detector and said main PLL comprises a high frequency digital phase/frequency detector. The method may further include gathering, electro-magnetic information about the one or more objects; classifying or recognize each of the one or more objects by analyzing the data, wherein the classification or recognition is based on a unique signature obtained from each of the one or more objects; generating an electromagnetic map of the surrounding environment by utilizing unique signatures of the one or more objects; and combining the electromagnetic map with a geographical map or physical map.
Hereinabove, the method may further include recognizing the object on interest after classifying, wherein the classification of the object of interest includes living or non-living thing, stationary or moving object, animal or human, standing or mobile human, metallic, wooden, or concrete objects.
Dr. Tal Lavian offers insightful and decisive expertise as a telecommunications expert witness and network communications expert witness.